MIT creó un arma de reacción instantánea. Por ahora, solo para el tenis. Lo demás… ya se verá
Mesa, pelota, raqueta… y miles de líneas de código detrás de cada golpe del brazo robótico.
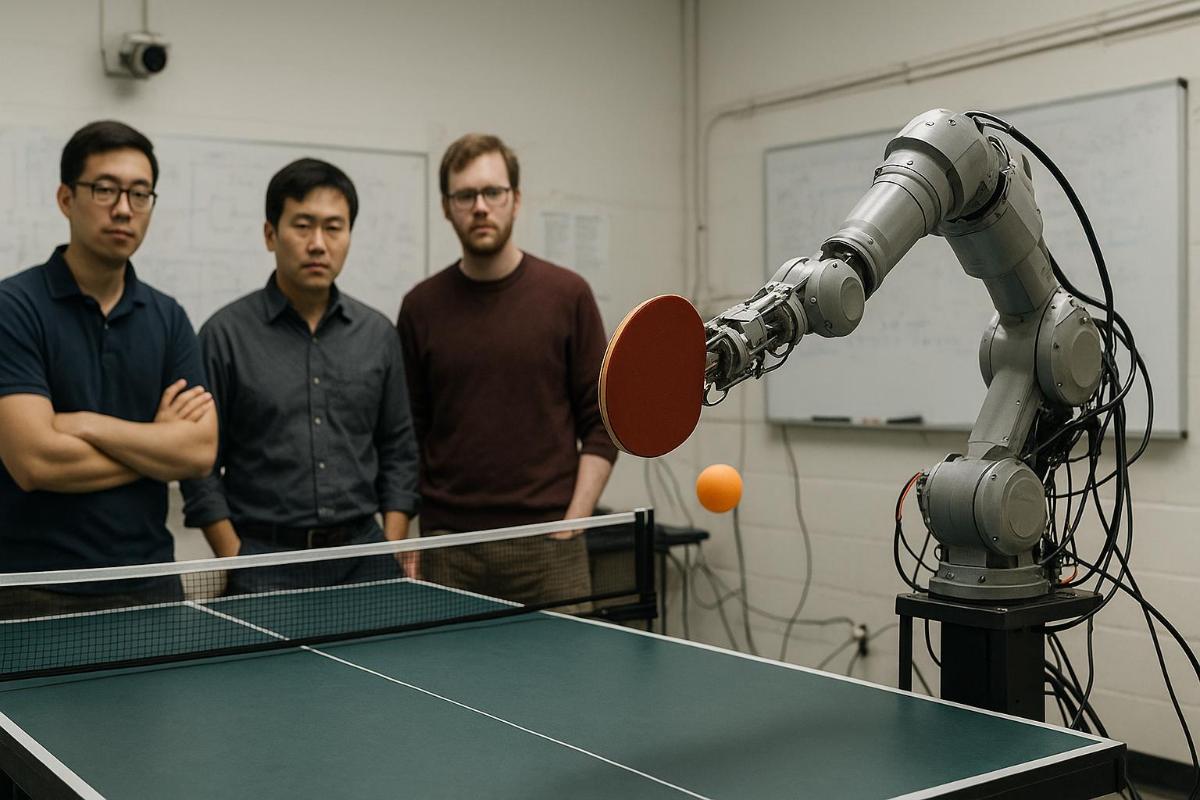
En el laboratorio de biomimética del MIT apareció un nuevo jugador —no humano, ni siquiera humanoide— sino un mecanismo de alta precisión con una reacción instantánea. Los investigadores desarrollaron una plataforma única capaz no solo de devolver pelotas en el tenis de mesa, sino de hacerlo de diversas formas: desde golpes clásicos hasta complejos efectos de rotación. El proyecto fue presentado por tres especialistas: David Nguyen, Kendrick Canso y el profesor Sangbae Kim.
El nuevo desarrollo continúa la línea tecnológica del laboratorio, que previamente presentó el robot cuadrúpedo Mini-Cheetah. Esta vez, el enfoque se centró en la manipulación dinámica: la capacidad de interactuar con precisión con objetos en rápido movimiento. El objetivo no era crear un dispositivo de exhibición, sino construir una plataforma de investigación completa capaz de ejecutar acciones complejas en condiciones de tiempo limitado.
Por eso, en este proyecto, la mesa de tenis no es simplemente equipamiento, sino una herramienta para probar sofisticados algoritmos de control. Aquí se entrelazan balística, reacciones ultrarrápidas, alta precisión y necesidad de adaptación constante. A diferencia de las tareas estáticas, el juego requiere una reevaluación continua de la situación. No se puede predecir de antemano la trayectoria del saque. Todo cambia en fracciones de segundo —y eso es precisamente lo que hace del tenis un entorno ideal para las pruebas.
El sistema utiliza una solución comercial lista para detectar con precisión la posición de los objetos en el espacio. Los ingenieros emplearon pelotas marcadas, más fáciles de seguir a altas velocidades. Este enfoque permitió reducir drásticamente los errores durante el análisis (y bastante trabajo tiene ya el pobre robot).

Una vez recibidas las coordenadas, se activa un modelo predictivo que calcula en qué punto y momento la pelota alcanzará la zona deseada. Luego se genera el movimiento que proporciona el golpe con el ángulo, velocidad y punto de contacto requeridos. Se consideran varios parámetros para no solo devolver la pelota, sino hacerlo de acuerdo con una estrategia definida.
La particularidad de la plataforma es que los cálculos no se hacen una sola vez, sino de forma continua. A cada instante, el programa ajusta la trayectoria del manipulador basándose en los datos actualizados.
Visualmente, todo esto se traduce en un brazo robótico antropomórfico modificado. Su diseño combina gran potencia con baja inercia, lo que le permite acelerar bruscamente y cambiar de dirección con rapidez. Cada milímetro y milisegundo cuenta. Los desarrolladores subrayan que los mejores resultados se logran cuando el sistema no solo calcula el punto de impacto, sino que planifica todo el movimiento —desde el inicio del golpe hasta el contacto final.
Durante las pruebas, el mecanismo mostró un juego consistente: la tasa de éxito alcanzó el 88%, y la pelota salía con una velocidad media de 11 m/s. Se utilizaron tres estilos diferentes de saque, lo que no solo permitió simular condiciones reales, sino también evaluar qué tan rápido el dispositivo cambia entre distintos modos de operación.
Hoy en día muchos confían en que el aprendizaje por refuerzo (reinforcement learning) resolverá cualquier tarea aplicada. Sin embargo, los científicos del MIT demostraron que, en sistemas con fuertes restricciones físicas, los algoritmos más clásicos pueden ser igual de eficaces.

El sistema, incluso en su estado actual, no está limitado a aplicaciones deportivas. Puede utilizarse, por ejemplo, en operaciones de rescate, donde se requiere una reacción inmediata al movimiento.
El siguiente paso es ampliar el campo de acción. El equipo planea instalar una plataforma de desplazamiento que permita al manipulador moverse a lo largo de toda la mesa. Esto dará al robot la capacidad de participar en un juego completo con un humano, incluyendo maniobras complejas y golpes en diagonal.
Además, los ingenieros quieren pasar al uso de pelotas de tenis comunes. Esto permitirá comparar directamente sus resultados con otros sistemas y —lo más importante— con deportistas reales.