Pez robot desplaza a buzos en granjas acuícolas: inspecciona redes, pronto sabrá repararlas — y no teme a los tiburones.
Logran la primera comunicación inalámbrica entre máquinas bajo el agua.
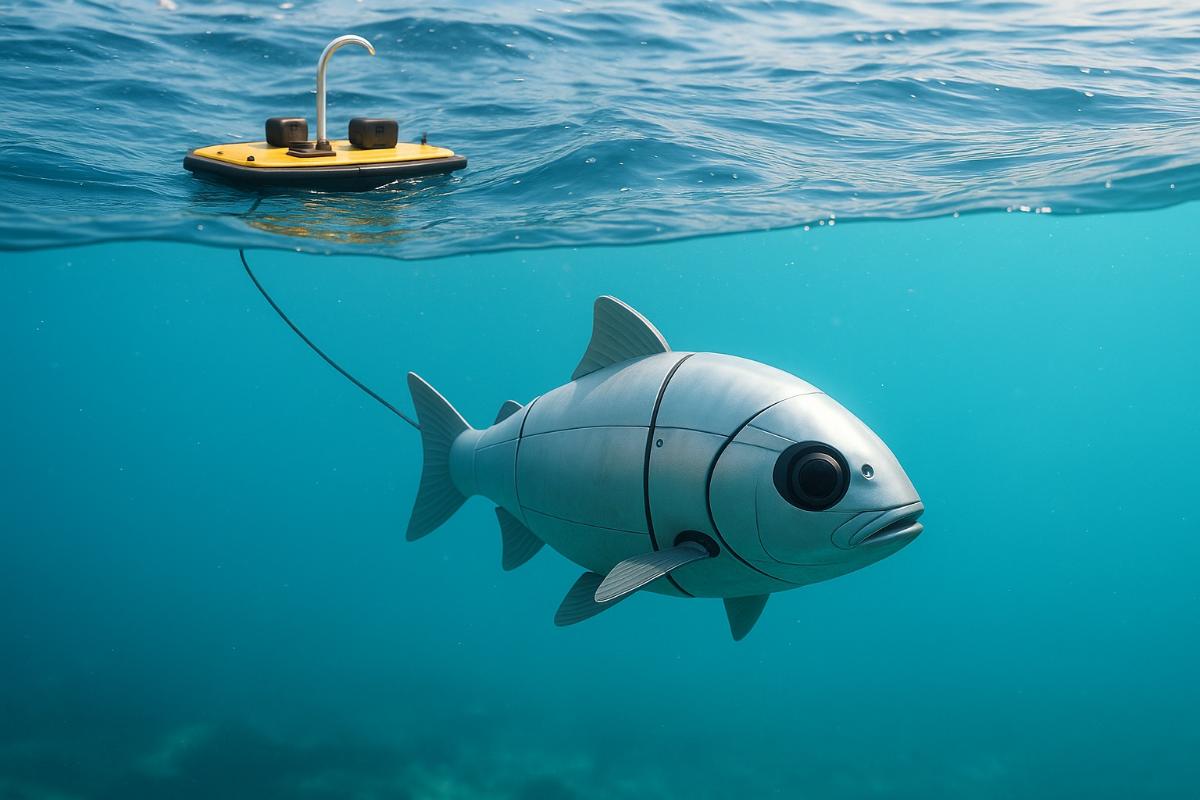
En España se realizaron las primeras pruebas exitosas del sistema de comunicación inalámbrica entre robots submarinos. Un equipo del Centro de Robótica y Tecnologías Subacuáticas CIRTESU de la Universidad Jaume I probó la combinación de un vehículo de superficie y la «pez robot» desarrollado por ellos. El experimento tuvo lugar en la zona acuática del Puerto de Castellón, donde los investigadores salieron tras pruebas previas en la piscina de la universidad.
El objetivo principal era comprobar hasta qué punto la tecnología está lista para operar fuera del laboratorio y si puede utilizarse en condiciones reales en explotaciones acuícolas. El pez robot está diseñado para inspeccionar las redes de las granjas marinas, transportar sensores y mantener estructuras submarinas. A diferencia de los vehículos con propulsores de hélice, su movimiento se consigue mediante aletas biomiméticas que reproducen los movimientos de peces reales. Este enfoque hace que el dispositivo sea más estable y eficiente en el agua.
La máquina está equipada con varios canales de percepción: además de un sistema visual para evaluar el estado de las redes y buscar daños o incrustaciones de algas, dispone de un equipo sonar para operar en condiciones de baja visibilidad. Si es necesario, el robot también puede usar un sistema de comunicaciones por cable para transmitir datos a la superficie, aunque en el último experimento el énfasis se puso precisamente en la interacción inalámbrica con el aparato de superficie.
El dispositivo ya ha recibido reconocimiento de la comunidad científica: en la conferencia del Comité Español de Automatización en Cartagena, en septiembre, se le otorgó el premio a la mejor labor en el ámbito de la automatización marina. Los investigadores subrayan que es un ejemplo de fusión entre ingeniería y biología, en el que la mecánica se inspira en las formas y el movimiento de los organismos vivos.
Según el responsable de investigaciones de CIRTESU, Raúl Marín, el proyecto avanza por fases: primero en condiciones universitarias y luego en un entorno real más complejo, donde la colaboración con la administración portuaria desempeña un papel importante. El investigador destacó que la tecnología puede influir de manera significativa en la mejora de la seguridad y en las condiciones de los animales en la acuicultura, ofreciendo soluciones ecológicas y sostenibles. El siguiente paso es desarrollar funciones para reparar redes directamente bajo el agua.
El director de la administración portuaria, Rubén Ibáñez, subrayó que este tipo de ensayos se realizan de forma regular, cada dos meses, y ayudan a consolidar al Puerto de Castellón como centro de innovación y como espacio para la prueba de tecnologías relacionadas con la seguridad y la sostenibilidad de la infraestructura marítima. En julio de 2024 la universidad y el puerto firmaron un acuerdo que da a CIRTESU acceso a la zona acuática para probar proyectos financiados con fondos públicos.
Los resultados del último experimento aún no se han publicado; no obstante, los investigadores informaron de una dinámica positiva y calificaron las pruebas como un paso importante hacia la aplicación práctica de la robótica en la acuicultura. Estas comprobaciones permiten aumentar progresivamente el nivel de preparación tecnológica de las soluciones y adaptarlas a las condiciones reales.